La coppia di un motore
[et_pb_section fb_built="1" admin_label="section" _builder_version="3.0.47"][et_pb_row admin_label="row" _builder_version="3.0.47" background_size="initial" background_position="top_left" background_repeat="repeat"][et_pb_column type="4_4" _builder_version="3.0.47" parallax="off" parallax_method="on"][et_pb_text module_class="linkverdi" _builder_version="3.19" background_size="initial" background_position="top_left" background_repeat="repeat" use_border_color="off"]
Capita spesso che chi è alle prime armi faccia confusione fra coppia, potenza, forza di un motore. In questo breve articolo vedremo di chiarire questi concetti per i principianti.
Momento di una forza
Quando si esamina la scheda tecnica di un motore, si vede che viene fornita la coppia, espressa in kg*cm oppure N*m. L'unità di misura Kg*cm forse è la più semplice da capire.
Immaginiamo di voler bloccare il motore esercitando una forza. Se il motore ha una coppia di 20Kg*cm significa che, per fermarlo, dobbiamo usare una leva che eserciti una coppia opposta. La coppia esercitata dalla leva è data dalla Forza moltiplicata per la lunghezza della leva (braccio). Se abbiamo una leva lunga 10cm, la forza necessaria sarà di 2kg, se la leva fosse lunga 100cm la forza necessaria per bloccare il motore sarebbe di 0,2kg cioé 200 grammi.
Come abbiamo visto, la coppia non è data solo dalla forza che noi applichiamo, ma dipende anche dal braccio, cioé dalla distanza dall'asse di rotazione.
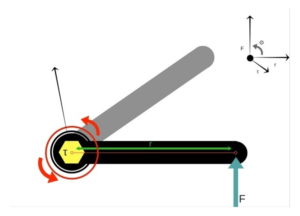
Immaginate la situazione riportata nella figura 1. Immaginate che il vostro motore sia al posto del bullone esagonale a sinistra. La distanza d viene chiamata braccio della forza e F è la forza che dovete esercitare per bloccare il motore (o per svitare un bullone).
Immaginate che il nostro motore abbia una coppia di 20kg*cm se il braccio d fosse 10cm, applicando 2kg come F, riusciremmo a bloccare il nostro motore.
Se il nostro braccio d fosse 1m cioé 100cm, sarebbero sufficienti 0,2kg cioé 200g per bloccare il motore. La coppia, quindi, non è semplicemente una forza o un "peso" che il motore riesce a contrastare, ma è data dal prodotto
F*d
Nel nostro esempio F*d deve essere sempre uguale a 20kg*cm.
Si deduce che la configurazione meccanica del sistema è molto importante. Lo stesso motore in condizioni di lavoro diverse, sviluppa prestazioni apparentemente differenti. Se teniamo presente, invece, la definizione di coppia come prodotto di due grandezze, vediamo che le prestazioni del motore sono costanti.
Dato che una ruota, una puleggia o un'asta sono sempre delle leve applicate ad un motore, dovete tener conto della vostra configurazione per scegliere la coppia esatta.
Rapporto di riduzione
Se guardate il nostro catalogo motori vedrete che forniamo configurazioni con diverso numero di giri. Spesso ci capitano dei clienti che ci dicono: "Io acquisto un motore da 60 giri e poi lo riduco elettronicamente a 10 giri o ai giri che mi servono".
Questo tipo di regolazione è sicuramente realizzabile, ma va considerata anche in questo caso la coppia. Se guardate bene i motori, vedrete che il 60 giri ha una coppia 5 volte più piccola del 12 giri. Se acquistate un motore da 60 giri e lo fate lavorare a 10 giri, avrete una ulteriore riduzione di coppia dovuta al punto di lavoro non ottimale. Quindi facendo un esempio semplice, se prendete un 60 giri con 135kg*cm, e lo fate lavorare a 10 giri al minuto, otterrete circa 50kg*cm o meno a seconda del tipo di motore e controllo. Se prendete un motore da 12 giri/min avrete una coppia di 584 kg*cm. Cioé siamo oltre le 10 volte di più che far lavorare un motore in condizioni di moto ridotto. Per questo motivo, vi consigliamo sempre di acquistare un motore che abbia un numero di giri molto vicino a quello che vi serve, per ottimizzare le prestazioni. Se invece avete la necessità di lavorare in un intervallo ampio di velocità, dovete scegliere una coppia soradimensionata rispetto alle vostre reali esigenze.
[/et_pb_text][/et_pb_column][/et_pb_row][/et_pb_section]